iHuman Lab
Home
Research
Publications
People
News
Software
Gallery
Outreach
Join
Explore our work
Research
@iHuman
Human Factor Analysis of Helicopter Accidents using Large Language Models
SHASTA A Simulator for Human and Swarm Team Applications
Selective Eye-gaze Augmentation To Enhance Imitation Learning In Atari Games
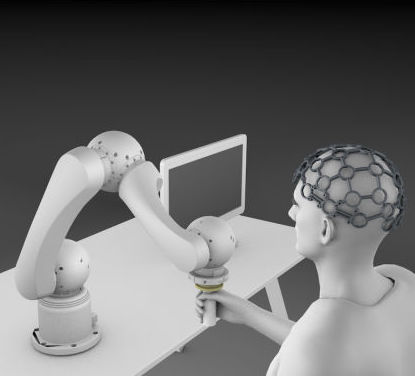
Transfer Learning of Motor Difficulty Classification in Physical Human-Robot Interaction Using Electromyography
Classification of Reaction Time in Simulated Multiple Robot Tele-Exploration
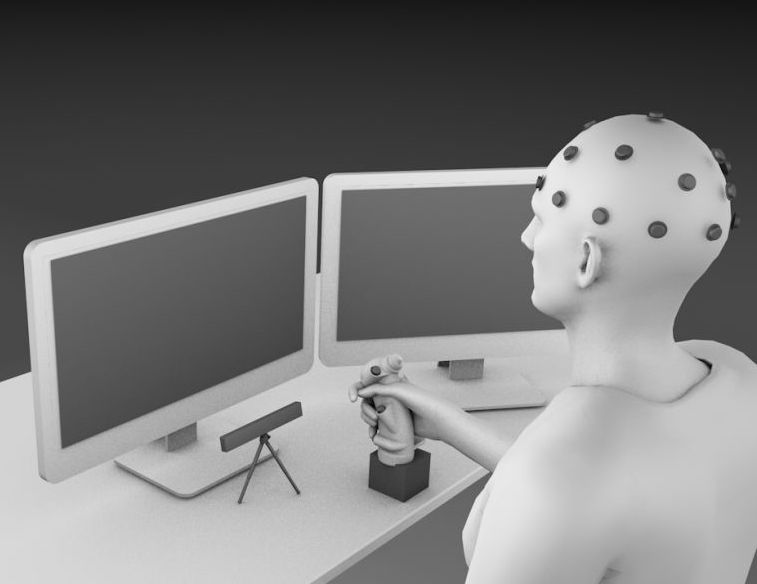
Task Difficulty Prediction in Physical Human Interaction using EEG and Deep Learning
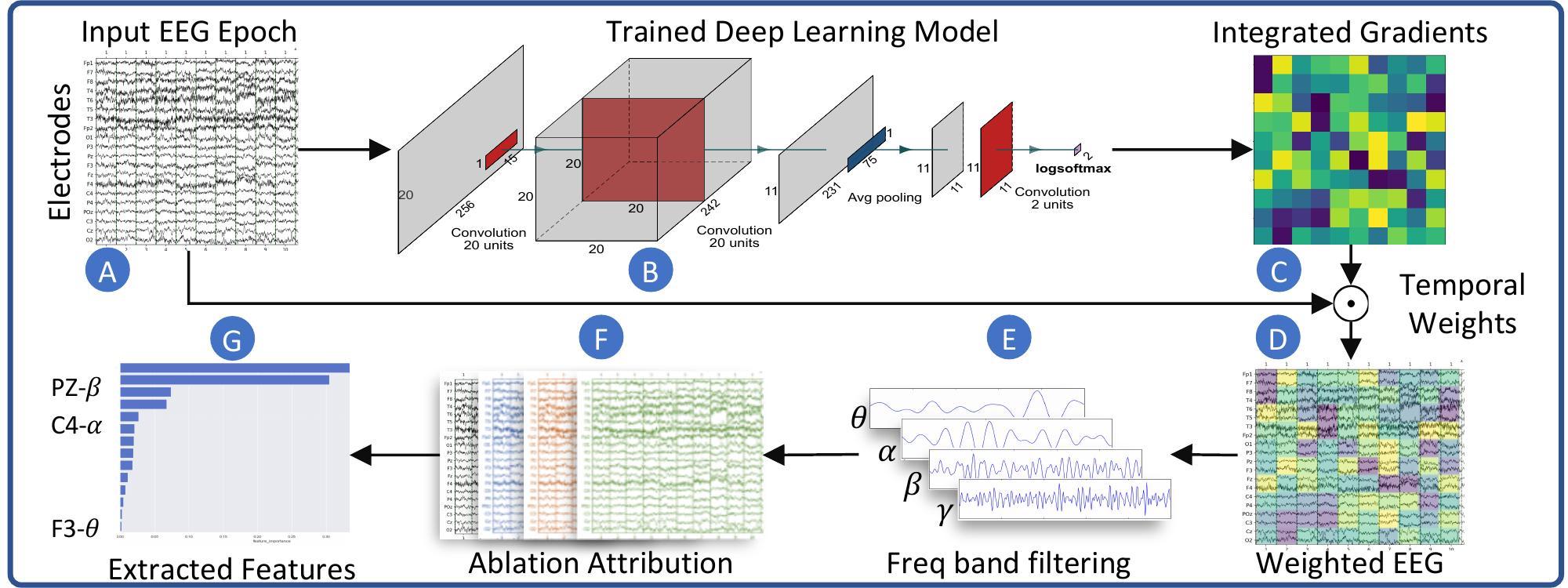
Extracting Interpretable EEG Features from a Deep Learning Model to Assess the Quality of HRI
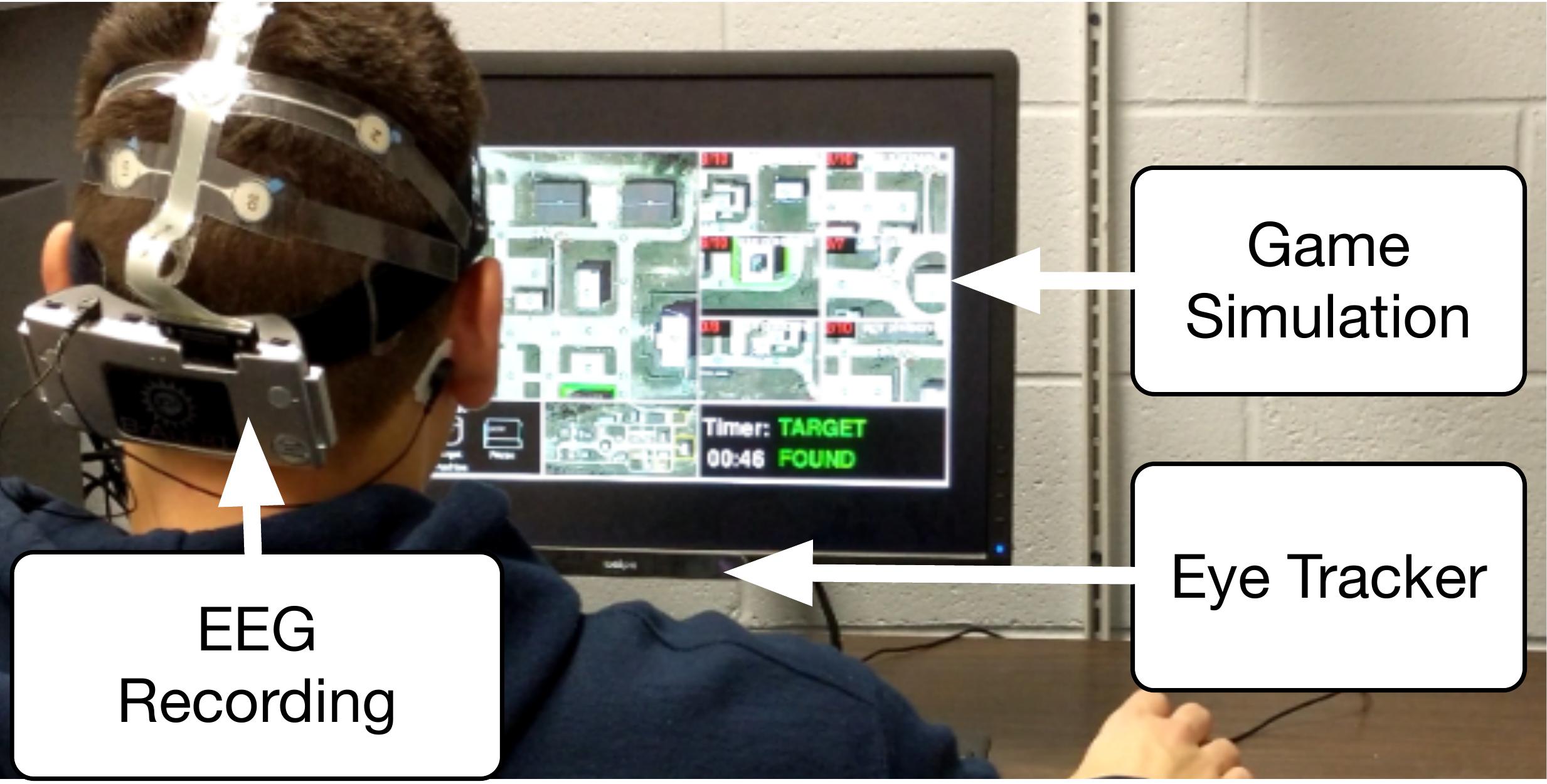
Using Physiological Measurements to Analyze the Tactical Decisions in Human Swarm Teams
No matching items